Eficacia del movimiento de rotación de caninos con el sistema de alineadores Invisalign®
Vivero Couto, L. Román Jiménez, M
Descargar artículo
![]() Descargar artículo completo en pdf (1.794 KB)
Descargar artículo completo en pdf (1.794 KB)
Citar
Vivero L, Román M. Eficacia del movimiento de rotación de caninos con el sistema de alineadores Invisalign®. Ortod. Esp. 2021; Vol. 59 (4); 575-584
Resumen
Objetivo: El principal objetivo de este estudio es cuantificar el porcentaje del movimiento de rotación de caninos planificado que se va a expresar en los resultados clínicos para establecer con mayor exactitud el porcentaje de sobrecorrección a la hora de planificar este movimiento.
Material y métodos: En la muestra se incluyeron 189 casos publicados en la Invisalign® Global Gallery, en los cuales se comparó, en grados, el movimiento de rotación de caninos planificado en el ClinCheck® inicial con la planificación de ese mismo movimiento en el ClinCheck® de alineadores adicionales (refinamiento). A partir de esos datos, se calculó el porcentaje de movimiento no producido. El test de Friedman y el test de correlación de Spearman fueron utilizados para correlacionar la proporción de movimiento conseguido con otras variables.
Resultados: En los casos de nuestro estudio, un 54,28% del movimiento de rotación planificado se tradujo en resultados clínicos. Este porcentaje es del 51,32% en los caninos superiores y del 57,26% en los inferiores. La proporción de movimiento planificado que se produce va en aumento hasta rotaciones de 15 grados, a partir de ese valor, se estabiliza la proporción del movimiento producido.
Conclusiones: En nuestro estudio encontramos que el movimiento de rotación de los caninos conseguido fue en torno a la mitad del movimiento planificado, por lo que será necesario monitorizar especialmente este movimiento, sobre todo en rotaciones menores de 15º. Los autores recomiendan el uso ataches, incluso para rotaciones por debajo de 5º, comprobar el espacio mesiodistal liberando los puntos de contacto, el uso de alineadores de sobrecorrección e incluso la utilización de técnicas auxiliares para evitar realizar uno o varios refinamientos para alcanzar este movimiento.
Abstract
Objectives: The aim of this project is to calculate the proportion of planned canine rotation movement that would translate into clinical movement, in order to accurately determine the amount of overcorrection that needs to be programmed.
Material and Methods: Our sample was made up of 189 clinical cases form Invisalign® Global Gallery. In these cases, the canine rotation movement programmed in the first ClinCheck®, measured in degrees, was compared with the amount of that same movement in the Aditional Aligners ClinCheck®. Based on these results, the proportion of non-obtained movement was calculated. Friedman test and Spearman correlation test were used to correlate the proportion of obtained movement with other variables.
Results: In our sample, 54,28% of the planned rotation movement was clinically obtained; 51,32% in upper canines and 57,26% in lower canines. The amount of planned movement that is finally translated into clinical results grows with the amount of programmed movement up to 15 degrees of rotation.
Conclusions: Overcorrection in canine rotation movement should be programmed taking into account that only half of the planned movement would be obtained. In order to increase the accuracy of this movement, it is recommended to use ataches, to plan Interproximal Reductions and to use auxiliary techniques.
Key words: clear aligner appliances, Invisalign, Orthodontic Tooth Movement.
Introducción
Los sistemas de ortodoncia con alineadores actualmente se encuentran firmemente instaurados en nuestra práctica diaria, gracias a que han experimentado un importante desarrollo junto con una creciente demanda por parte de los pacientes. Nos encontramos en un momento donde se busca la eficiencia en estos sistemas de ortodoncia, en aras de obtener mejores resultados y disminuir la duración de tratamiento utilizando menos recursos.
Esta eficiencia, en los sistemas de ortodoncia con alineadores, pasa por una correcta transferencia de los movimientos planificados a la situación clínica real del paciente al final del tratamiento.
En el sistema Invisalign™ (Align Technology, Inc.) el software ClinCheck® es la base de todas las interacciones entre el clínico y el CAD Designer, donde se planifican todos los movimientos y vemos una simulación de los objetivos 1,2. A pesar de las recientes mejoras en el sistema Invisalign, actualmente los movimientos planificados en el ClinCheck® no van a transferirse por completo a la situación clínica del paciente.
Si se conociera con exactitud el porcentaje de cada movimiento que se va a producir clínicamente, se podría prever esta complicación con una cantidad de hipercorrección y/o sobrecorrección determinadas en función de la proporción de movimiento que no se producirá 3.
En una revisión sistemática llevada a cabo por Mortazavi et al en 2020 4, se concluyó que con sistemas de alineadores transparentes, la corrección de la rotación fue el movimiento menos predecible en comparación con otros movimientos.
En otra revisión sistemática, se observó una mayor limitación en los movimientos de rotación, recomendando el uso de ataches y/o de aparatología auxiliar para facilitar estos movimientos 5.
Los movimientos de rotación en dientes con una forma anatómica redondeada de las coronas, como los caninos y los premolares, se consideran poco predecibles con este sistema 6. Además de la morfología de la corona dentaria, la gran superficie radicular que se puede observar en los caninos va a jugar también un importante papel a la hora de limitar la predictibilidad de los movimientos de rotación en estos dientes, ya que va a ser necesario aplicar una mayor cantidad de fuerza a estos dientes para conseguir el movimiento deseado 7. Por otra parte, los caninos suelen tener un punto de contacto interproximal distal extenso, en el contacto con el primer premolar. Este punto de contacto va a ejercer resistencia contra el movimiento de rotación 8.
Los autores que han analizado el porcentaje de rotación planificada que finalmente se produce en estos dientes han observado porcentajes muy bajos, en la mayor parte de los casos en torno al 50% 9.
Para poder aumentar la predictibilidad de este movimiento, algunos autores hacen diversas recomendaciones, como la colocación de ataches 10, la obtención de espacio mediante IPR (Interproximal Reduction – reducción interproximal o stripping), expansión o el uso de “chewies” para evitar o disminuir la pérdida de tracking 11, 12, así como la planificación de movimientos de compensación o sobrecorrección para estos movimientos menos predecibles 13.
Esta última herramienta, de gran utilidad a la hora de mejorar la predictibilidad de los tratamientos de ortodoncia con alineadores, ha de ser cuidadosamente planificada y cuantificada para poder ser empleada con eficacia.
Por lo tanto, el objetivo principal de este estudio será cuantificar la proporción del movimiento planificado que se va a traducir en resultados clínicos en lo relativo a los movimientos de rotación de caninos. Así, podremos calcular con mayor exactitud el porcentaje de sobrecorrección que debemos planificar en el ClinCheck®.
Por otra parte, también se va a evaluar la asociación entre la proporción de movimiento de rotación de caninos conseguida y otras variables, para así poder determinar qué casos van a ser menos predecibles.
Material y métodos
El presente trabajo se trata de un estudio con un diseño observacional y longitudinal retrospectivo. Para llevarlo a cabo, en los pacientes incluidos en la muestra se ha analizado la situación final planificada en el primer ClinCheck® y se ha comparado con la situación inicial del ClinCheck® de alineadores adicionales (refinamiento). La muestra se ha obtenido de entre los casos disponibles en la Invisalign® Global Gallery, cuya accesibilidad, unida a la gran cantidad de casos disponibles en la misma, le otorgan un gran valor a la hora de realizar un estudio como el presente 14.
El reclutamiento de la muestra se hizo mediante un muestreo no probabilístico de casos consecutivos, siendo los criterios de inclusión aquellos casos tratados con Invisalign® Full o Comprehensive, cuyos alineadores estuviesen fabricados con el material SmartTrack®. Se excluyeron aquellos casos tratados por odontólogos generales o por profesionales sin formación especializada en ortodoncia, así como casos en los que no se hubieran solicitado alineadores adicionales.
Aplicando estos criterios, se obtuvieron 224 casos. Una vez analizados los 50 primeros casos de la muestra, se realizó un cálculo del tamaño muestral utilizando los datos obtenidos de esos 50 casos a modo de estudio piloto.
Una vez hecho el cálculo del tamaño muestral se obtuvo, para una población finita de 224 casos y un intervalo de confianza del 95%, un tamaño muestral de n = 189 individuos, que será el tamaño muestral que se necesitará para alcanzar la máxima potencia estadística de los test empleados.
En una hoja de cálculo se recogió, para cada caso, el movimiento de rotación, en grados, para cada uno de los caninos, tal y como se reflejaba en la tabla de movimiento dentario del ClinCheck® inicial. A continuación, se recogió el valor de este mismo movimiento para cada canino en el ClinCheck® aprobado para la fase de alineadores adicionales.
A continuación, se calculó la cantidad de rotación producida como la diferencia entre la cantidad de rotación solicitada en el ClinCheck® inicial y la cantidad de rotación solicitada en el ClinCheck® de alineadores adicionales, ya que, idealmente, en la segunda fase del tratamiento se planificaría la magnitud del movimiento que no se logró en la primera fase de alineadores. A partir de esta segunda variable se calculó el porcentaje de movimiento producido en la fase inicial del tratamiento.
Previo al tratamiento estadístico de los datos recogidos en el estudio, se recurrió al test de Kolmogorov-Smirnov como prueba de normalidad. Según este test, nuestra muestra no sigue una distribución normalizada, por lo que se recurrió al uso de test no paramétricos.
Los movimientos de rotación planificados y solicitados para los caninos se evaluaron desde el punto de vista de la estadística descriptiva para, a continuación, utilizar el test de Friedman para comparar los movimientos conseguidos en los cuatro caninos.
Resultados
La muestra estuvo formada por 189 individuos, 52 de los cuales (27,5%) eran de sexo masculino y los 137 restantes (72,5%), de sexo femenino. La edad de los participantes estaba en el rango de entre los 10 y los 59 años, con una mediana de 27 años y una media de 27,79 años (DS = 9,66).
En el ClinCheck® inicial, para el canino superior derecho se solicitó una rotación media de 11,66º (DS=10,6), mientras que para los alineadores adicionales, la cantidad de rotación media planificada en los casos de nuestra muestra fue de 5,06 grados. Según los datos obtenidos en el presente estudio, la rotación que se produjo en el primer set de alineadores fue de 6,59 grados (DS=9,69). Medido en porcentaje, la rotación obtenida fue, de media, un 48,82% del movimiento solicitado. [Tabla 1]

Tabla 1. Valores medios obtenidos en la muestra.
La rotación media planificada para el canino superior izquierdo en el ClinCheck® inicial en los pacientes de nuestra muestra fue de 11,54º (DS=8,5), mientras que en los alineadores adicionales se planificó una rotación de 4,60 grados de media (DS=4,7). Así, el primer set de alineadores logró, para este diente, una rotación media de 6,94 grados (DS=8,4), que correspondería a un 53,8% de la rotación planificada en el ClinCheck® inicial.
Para el canino inferior izquierdo, en el primer set de alineadores, correspondiente al ClinCheck® inicial, se planificó una rotación media de 13,24 grados en los casos de la muestra del presente estudio (DS=11,98). En cuanto al ClinCheck® correspondiente a los alineadores adicionales, se solicitó una rotación media de 4,27 grados (DS=4,26). Por lo tanto, para el canino inferior izquierdo se logró una rotación media de 8,98 grados (DS=11,21) en el primer set de alineadores, produciéndose un 57,05% del movimiento de rotación planificado.
Por último, en el primer ClinCheck® se planificó una rotación media de 13,4 grados (DS=11,39) para el canino inferior derecho, mientras que en el set de alineadores adicionales se solicitó una rotación media de 4,3 grados para este diente (DS=4,4). En vista a los datos obtenidos en el presente estudio, podríamos concluir que se ha producido una rotación media de 9,09 grados (DS=10,6) en el 4.3, correspondiente a un 57,46% del movimiento solicitado.
A continuación, se hizo el test de Friedman para valorar la posible existencia de diferencias en el movimiento de rotación conseguido entre unos dientes y otros. Según esta prueba, no existen diferencias estadísticamente significativas (p>0,05) en el movimiento de rotación producido en los cuatro caninos.
Los casos de la muestra se dividieron, para cada canino, en ocho grupos en función de la magnitud del movimiento de rotación solicitado en el ClinCheck® inicial. Para cada uno de estos grupos, se calculó el porcentaje medio de rotación que se había producido en el primer set de alineadores. Estos resultados se reflejan en la tabla 2.
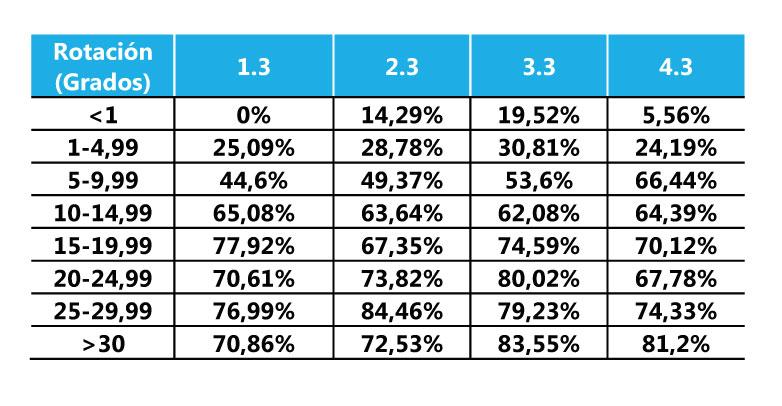
Tabla 2. Porcentaje de rotación de caninos conseguida en función de la magnitud del movimiento de rotación planificado
Como se puede apreciar en la tabla, para los cuatro dientes estudiados, el porcentaje de movimiento de rotación que realmente se produce aumenta progresivamente al aumentar la magnitud del movimiento planificado para esa fase del tratamiento. Este aumento se detiene aproximadamente en los 15 grados de rotación, valor a partir del cual la variable correspondiente al porcentaje de movimiento logrado se mantiene estable, aunque aumente la cantidad de rotación planificada.
Discusión
En el presente estudio, se ha analizado el movimiento de rotación de caninos con el sistema de alineadores Invisalign®, al considerarse éste como uno de los movimientos menos predecibles en tratamientos de ortodoncia con sistemas de alineadores. Calculando la diferencia entre el movimiento de rotación solicitado en el primer ClinCheck® y la magnitud de este mismo movimiento planificado en el ClinCheck® de alineadores adicionales, se ha estimado el porcentaje de movimiento de rotación que se había producido clínicamente.
Nuestra muestra, tomada a partir de la Invisalign® Global Gallery, estuvo compuesta por 189 individuos. Esta muestra supera ampliamente en tamaño a las muestras empleadas por otros autores, con unos tamaños muestrales de entre los 16 y los 38 individuos 2, 3, 7, 8, 9, 15.
Según se ha observado en un estudio realizado por Marques y colaboradores 16, existen diferencias estadísticamente significativas en la finalización de los casos de ortodoncia entre especialistas en ortodoncia y odontólogos generales que practican la ortodoncia sin tener formación adicional. En este mismo estudio, un 96,7% de los casos presentados por ortodoncistas se considerarían aprobados según el índice ABO, mientras que únicamente un 50% de los casos presentados por odontólogos generales pasarían dicha prueba. Por este motivo, se decidió incluir en este estudio únicamente aquellos casos que hubieran sido tratados por ortodoncistas, excluyendo los casos tratados por odontólogos generales.
También se excluyeron tratamientos cuyos alineadores hubieran sido fabricados en un material diferente del SmartTrack®, para evitar que el material de los alineadores actuase a modo de factor de confusión.
Igualmente, se excluyeron casos tratados con opciones de tratamiento diferentes de Invisalign® Full o Invisalign® Comprehensive, evitando así incluir en la muestra casos que se hubieran tratado buscando cumplir objetivos “parciales”.
Al igual que ocurría en otros estudios, la mayor parte de los integrantes de la muestra (72,5%) eran de género femenino. Esto puede responder a una mayor demanda de tratamientos estéticos entre la población femenina, que preferirán un tratamiento de ortodoncia más estético, como son los sistemas con alineadores, antes que un tratamiento convencional, con aparatología fija multibrackets.
En cuanto a la metodología, otros estudios analizaron la ocurrencia de unos movimientos u otros superponiendo, con un software específico, los archivos .stl correspondientes a los modelos digitales iniciales y finales 3, 7, 8, 9, 15. Sin embargo, Invisalign® Global Gallery no permite exportar los modelos en formato .stl, por lo que, en este trabajo, se estimó este movimiento a partir de los movimientos planificados en la tabla de movimiento dentario utilizando el software ClinCheck® Pro 5.6. Entre los estudios consultados para la realización del presente trabajo, ningún otro autor empleó este sistema para cuantificar el movimiento producido por un set de alineadores.
En los casos de nuestra muestra, un 54,28% del movimiento de rotación planificado en los cuatro caninos se tradujo en resultados clínicos. Este porcentaje es del 51,32% en los caninos superiores y del 57,26% en los inferiores.
Nuestros resultados son similares a los obtenidos por Lombardo y colaboradores 15, con la diferencia de que, en su muestra, el porcentaje de movimiento producido en los caninos superiores fue mayor que en los inferiores. En el presente estudio, a pesar de tener un porcentaje de movimiento mayor en los caninos inferiores, no se observaron diferencias estadísticamente significativas entre superiores e inferiores, por lo que se considera que esta discrepancia de movimientos podría deberse al azar.
En cambio, en el estudio de Haouili 8, que no diferenció entre caninos superiores e inferiores a la hora de exponer sus resultados, el porcentaje de movimiento de rotación producido fue ligeramente inferior al nuestro, de un 47,43%.
La principal característica de esta publicación fue la diferenciación entre la rotación mesial y la distal. Estos autores concluyeron que la rotación distal era mucho menos predecible que la mesial, debido fundamentalmente al contacto interproximal distal de los caninos, de mayor superficie, y a la mayor dificultad para efectuar IPR en la cara distal de los caninos, en comparación a hacerlo en su cara mesial.
Por último, en el estudio de Kravitz 9 se observan porcentajes globales de movimiento muy inferiores a los nuestros, y a los de otros autores. Esto puede deberse principalmente a tres motivos. El primer motivo pudo ser el material utilizado, previo al actual SmartTrack®. El siguiente motivo pudo ser la división de los pacientes en tres grupos. En el primer grupo no se utilizaron ataches ni IPR, en el segundo grupo únicamente se colocaron ataches y en el tercer grupo no se recurrió a IPR. A diferencia de los demás estudios, en ningún grupo se utilizaron ataches e IPR al mismo tiempo, lo que puede reducir en gran medida la predictibilidad del movimiento de rotación de los caninos. El tercer motivo, bajo nuestro punto de vista, pudo ser la elección del atache vertical elipsoidal para realizar los movimientos de rotación en los caninos, lo que explica el bajo porcentaje de rotación conseguida en el grupo de pacientes con ataches. En la actualidad, el uso de ataches optimizados16 o el uso de ataches verticales rentangulares biselados en sentido contrario a la rotación, podrían minimizar este efecto 18.
En vista a los resultados observados en estos dos últimos estudios, uno de los principales factores que dificultan los movimientos de rotación en los caninos son los contactos interproximales fuertes, lo que explica el mayor porcentaje de movimiento conseguido en el estudio de Kravitz 9 en los pacientes del grupo de IPR, así como el menor porcentaje de movimiento conseguido en las rotaciones distales del estudio de Haouili 8.
Como se ha mencionado previamente, el porcentaje de movimiento de rotación que se produce en los cuatro caninos va aumentando conforme aumenta la magnitud de ese movimiento que se ha planificado en el ClinCheck®. Sin embargo, al llegar a los 15 grados de rotación planificada, este porcentaje tiende a estabilizarse, sin aumentar ni disminuir el porcentaje de movimiento de rotación planificado que realmente se produce.
Esta tendencia a una menor efectividad en el movimiento de rotaciones menores de 15 grados podría indicar que el clínico tiende a “subestimar” estas rotaciones y a no recurrir a técnicas que favorezcan la transferencia de este movimiento de rotación, como puede ser el IPR, la colocación de ataches, el uso de sobrecorreción o la utilización de aparatología auxiliar 8, 9.
Extrapolación clínica de los resultados del estudio
En vistas a los resultados del presente estudio, podemos concluir en una serie de recomendaciones para que, en la práctica clínica, los tratamientos de ortodoncia realizados con el sistema Invisalign® puedan tener una mayor predictibilidad.
Cuando se planifica un movimiento de rotación de un canino, el porcentaje de ese movimiento que se va a traducir en un resultado clínico o en un movimiento dentario va a encontrarse hasta un 50% del movimiento planificado. Por lo tanto, será de gran importancia la planificación y monitorización de todos los movimientos de desrotación de caninos, incluyendo especialmente aquellas que, por su menor magnitud, pueden parecer menos complejas y llevar al clínico a no monitorizar su progreso de una forma adecuada.
La primera recomendación sería no subestimar las rotaciones menores de 15 grados. Si bien clásicamente se han considerado como menos predecibles las correcciones de rotaciones mayores de esta cifra 19, en el presente estudio se ha observado que las rotaciones que se producían en menor medida eran aquellas de menor magnitud.
La colocación de ataches va a aumentar la superficie del diente en contacto con el alineador y va a disminuir la tendencia del alineador a “resbalar” sobre la superficie del diente, contrarrestando la forma redondeada de la corona de este. Actualmente el software coloca ataches de rotación optimizados en rotaciones mayores de 5º. Este puede ser otro de los motivos por los que no se produzca el movimiento, ya que en rotaciones menores de 5 grados el ClinCheck® no colocará ningún tipo de atache. Nuestra propuesta es, en caso de rotaciones menores de 5º o en caso de que el software no coloque el atache de rotación optimizado (ya sea porque no lo detecta, porque colisiona con la arcada antagonista, porque coloca otro tipo de atache o por otro motivo) colocar un atache vertical rectangular biselado en sentido contrario a la rotación, tal y como ya nos introdujo Román en el 2009 8.
Otra de las causas por las que en rotaciones menores de 15º se alcanzaron peores resultados que en rotaciones mayores, puede ser que el ClinCheck® tiene una jerarquía de ataches, y en caso de movimientos combinados, si el movimiento de rotación es leve “ganará” el otro tipo de movimiento y no se colocará el atache de rotación. Por ejemplo, en caso de un canino inferior con rotación leve y tip radicular mesiodistal moderado, el software colocará un atache optimizado de control radicular en lugar del atache optimizado de rotación.
Por otra parte, la reducción interproximal (IPR) disminuirá la resistencia que ejerce el punto de contacto interproximal al movimiento de rotación del canino. Esto va a tener mayor importancia en la cara distal, ya que el punto de contacto con el primer premolar tiene una superficie muy amplia, dificultando especialmente las rotaciones distales. Viendo los resultados de otros autores, el IPR puede tener una mayor influencia que la colocación de ataches sobre la efectividad del movimiento de rotación 8.
Boyd propuso la norma “sobrecorrección 11/10” para realizar movimientos de rotación con alineadores. Según este autor, habría que sobrecorregir el movimiento de rotación, planificando una rotación de 11 grados por cada 10 grados que se quiera rotar 20. Sin embargo, viendo los resultados de este estudio podríamos sugerir que esta sobrecorrección del 10% puede no ser suficiente en el caso de los caninos y otros dientes con coronas redondeadas, proponiendo así para estos dientes una sobrecorrección 14/10 o, incluso, 15/10. Esta propuesta, antes de su aplicación clínica, requeriría de más estudios que pudieran apoyarla. No obstante, en este apartado recomendamos pedir 4 o incluso 8 alineadores de sobrecorrección para las rotaciones de caninos en función de su magnitud.
Si, a pesar de la aplicación de estas técnicas, la rotación del canino sigue sin producirse al ritmo marcado por el ClinCheck®, podría ser recomendable recurrir al uso de técnicas auxiliares, como el uso de botones y elastoméricos (cadeneta elástica). Algunos autores recomiendan incluso, en rotaciones muy marcadas, el uso de estas técnicas auxiliares antes de comenzar con el tratamiento con alineadores 18.
En este trabajo, cabe destacar una serie de limitaciones que no ha sido posible evitar, inherentes fundamentalmente al diseño del estudio.
La primera de estas limitaciones implica que, utilizando casos de la Invisalign® Global Gallery, estamos recurriendo a casos que han sido enviados por los propios profesionales y, por lo tanto, seleccionados por los mismos. Aquellos casos en los que los objetivos del tratamiento no hayan sido alcanzados no van a registrarse en esta plataforma y, por lo tanto, han sido involuntariamente excluidos de este estudio.
A diferencia de otros estudios, en el presente trabajo no se ha diferenciado entre rotación mesial y distal de los caninos. En vistas a los resultados de otros estudios que sí lo han hecho, sería interesante hacer esta distinción en futuros estudios.
Tampoco hemos diferenciado entre el tipo de rotación, es decir, rotación pura sobre el eje del diente (como una bailarina) o tomando el centro de rotación en un eje paraaxial del diente (como la bisagra de una puerta).
Otra variable que no se ha tenida en cuenta, ha sido la relación entre la eficacia de la desrotación y la edad del paciente, pudiendo ser previsiblemente más favorable en pacientes jóvenes y menos en pacientes de elevada edad.
Otra propuesta de estudio sería contrastar las mediciones del ClinCheck Pro® mediante la superposición de archivos .stl iniciales y finales, tal y como han hecho otros autores. Como hemos mencionado previamente, este diseño de estudio no ha sido posible con nuestra muestra por la imposibilidad de exportar los archivos desde la Invisalign® Global Gallery, por lo que se podría repetir este mismo estudio con otra muestra.
Conclusiones
- Dentro de los casos de nuestro estudio, el porcentaje de movimiento de rotación producido en los caninos fue de un 51,31% del movimiento planificado en los caninos superiores, y de un 57,26% en los inferiores.
- El porcentaje de rotación conseguido en los pacientes de nuestra muestra aumenta directamente al hacerlo la cantidad de rotación planificada hasta los 15 grados. A partir de este valor, la predictibilidad de este movimiento se mantiene estable. Esto nos puede indicar una tendencia a subestimar las rotaciones de menor magnitud, sin planificarlas lo suficiente y sin monitorizar su progreso de forma adecuada durante el tratamiento.
- A la hora de aumentar la predictibilidad de los movimientos de rotación de los caninos habrá que tener en cuenta la reducción interproximal para liberar los puntos de contacto, la colocación de ataches (optimizados o biselados en sentido contrario a la rotación), el uso de alineadores de sobrecorreción y, en algunos casos, del uso de técnicas auxiliares antes del tratamiento para reducir la magnitud de esa rotación o durante el tratamiento para ayudar a alcanzar los objetivos.
- Se podría realizar un extra de corrección o hipercorrección (pasarnos a la hora de corregir la rotación dejando el ClinCheck® en una posición no ideal) de al menos un 10%, aunque esta hipercorrección podría ser mayor, hasta el 40-50%, en los casos de rotaciones de dientes redondos severas. Sin embargo, si estos movimientos se lograsen tendríamos un problema, ya que el resultado final no sería óptimo porque nos habríamos pasado, por lo que esta opción no nos gusta a los autores.
- Recomendamos el uso de 4 u 8 alineadores de sobrecorrección para la rotación de caninos, equivalentes a 8 o 16 grados de sobrecorrección respectivamente. Podemos solicitar 4 alineadores para las rotaciones menores de 15º y 8 alineadores para rotaciones mayores.
Referencias bibliográficas
[1] Krieger E, Seiferth J, Marinello I, Jung BA, Wriedt S, Jacobs C, et al. Invisalign(R) treatment in the anterior region: were the predicted tooth movements achieved? J Orofac Orthop 2012 Sep;73(5):365-376. [2] Dai FF, Xu TM, Shu G. Comparison of achieved and predicted tooth movement of maxillary first molars and central incisors: First premolar extraction treatment with Invisalign. Angle Orthod 2019;89(5):679-687. [3] Charalampakis O, Iliadi A, Ueno H, Oliver DR, Kim KB. Accuracy of clear aligners: A retrospective study of patients who needed refinement. Am J Orthod Dentofacial Orthop 2018 Jul;154(1):47-54. [4] Mortazavi M, Naeim M, Badri A, Sharif R, Hasheminasab M (2020) An updated systematic review on the efectivity of clear aligner therapy: a review. J Craniomax Res 7(4):165–177. [5] Rossini G, Parrini S, Castroflorio T, Deregibus A, Debernardi CL. Efficacy of clear aligners in controlling orthodontic tooth movement: a systematic review. Angle Orthod 2015 Sep;85(5):881-889. [6] Phan X, Ling P.Clinical Limitations of Invisisalign.JCDA April 2007, Vol. 73, No. 3 [7] Grünheid T, Loh C, Larson BE. How accurate is Invisalign® in nonextraction cases? Are predicted tooth positions achieved? Angle Orthod 2017;6(809-815). [8] Haouili N, Kravitz ND, Vaid NR, Ferguson DJ, Makki L. Has Invisalign® improved? A prospective follow-up study on the efficacy of tooth movement sith Invisalign. AJO-DO 2020. [9] Kravitz ND, Kusnoto B, Agran B, Viana G. Influence of attachments and interproximal reduction on the accuracy of canine rotation with Invisalign. A prospective clinical study. Angle Orthod 2008 Jul;78(4):682-687. [10] Simon M, Keilig L, Schwarze J, Jung BA, Bourauel C. Forces and moments generated by removable thermoplastic aligners: incisor torque, premolar derotation, and molar distalization. Am J Orthod Dentofacial Orthop 2014 Jun;145(6):728-736. [11] Bowman SJ. Improving the Predictability of Clear Aligners. Sem Orth 2020. [12] Bowman SJ, Celenza F, Sparaga J, Papadopoulos MA, Ojima K, Lin JC. Creative Adjunts for Clear Aligners. Part 2: Intrusion, Rotation, and Extrusion. JCO 2015;49(3):162-172. [13] Chan E DM. The Invisalign® appliance today: A thinking person’s orthodontic appliance. Semin Orthod 2020. [14] Invisalign® Global Gallery. 2020; Available at: https://global.invisaligngallery.com/es_es/. Accessed 11/15, 2020. [15] Lombardo L, Arreghini A, Ramina F, Huanca Ghislanzoni LT, Siciliani G. Predictability of orthodontic movement with orthodontic aligners: a retrospective study. Prog Orthod 2017 Nov 13;18(1):35-0. [16] Marques LS, Freitas Junior N, Pereira LJ, Ramos-Jorge ML. Quality of orthodontic treatment performed by orthodontists and general dentists. Angle Orthod 2012 Jan;82(1):102-106. [17] Humber P. Rotating canines using the Invisalign® system. Aesth Dent Today 2013;7:30-34. [18] Rivero J, Román M. La técnica Invisalign. Expoorto’09. Primera edición. Ripano;2009 [19] Kravitz ND, Kusnoto B, BeGole E, Obrez A, Agran B. How well does Invisalign® work? A prospective clinical study evaluating the efficacy of tooth movement with Invisalign. Am J Orthod Dentofacial Orthop 2009 Jan;135(1):27-35. [20] Boyd RL. Predictability of successfull orthodontic treatment using Invisalign. The Greater Philadelphia Society of Orthodontics. Accessed 01/12, 2020.
 Historia de Invisalign
Historia de Invisalign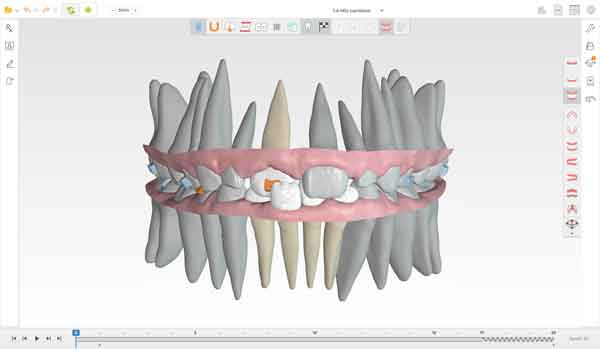 Tratamiento precoz de la mordida cruzada anterior con ortodoncia invisible (Invisalign & Spark)
Tratamiento precoz de la mordida cruzada anterior con ortodoncia invisible (Invisalign & Spark)